éšç€ç”µå技术的迅速å‘展,电å技术在汽车上的应用范围ä¸æ–扩大。汽车转å‘系统已从简å•çš„纯机械å¼è½¬å‘系统ã€æ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统(HydraulicPowerSteering,简称HPS)ã€ç”µåŠ¨æ¶²åŽ‹åŠ©åŠ›è½¬å‘系统(ElectricHydraulicPowerSteering,简称EHPS)å‘展到如今的更为节能åŠæ“纵性能更为优越的电动助力转å‘系统(ElectricalPowerSteering,简称EPS)。EHPSå’ŒEPSç‰åŠ©åŠ›ç³»ç»Ÿåœ¨æ±½è½¦ä¸Šçš„采用,改善了汽车转å‘力的控制特性,é™ä½Žäº†é©¾é©¶å‘˜çš„转å‘负担,然而汽车转å‘ç³»ç»Ÿå§‹ç»ˆå¤„äºŽæœºæ¢°ä¼ åŠ¨é˜¶æ®µï¼Œç”±äºŽè½¬å‘ä¼ åŠ¨æ¯”å›ºå®šï¼Œæ±½è½¦è½¬å‘特性éšè½¦é€Ÿå˜åŒ–进行一定的æ“作补å¿ï¼Œä»Žè€ŒæŽ§åˆ¶æ±½è½¦æŒ‰å…¶æ„愿行驶。如果转å‘盘与转å‘轮通过控制信å·è¿žæŽ¥ï¼Œå³é‡‡ç”¨ç”µå转å‘系统(Steering-By-WireSystem,简称SBWS),转å‘盘转角和汽车å‰è½®è½¬è§’之间关系(汽车转å‘çš„è§’ä¼ é€’ç‰¹æ€§ï¼‰çš„è®¾è®¡å°±å¯ä»¥å¾—到改善,从而é™ä½Žé©¾é©¶å‘˜çš„æ“纵负担,改善人—车é—环系统性能。本文综述了电å控制转å‘技术的å‘展ã€åŽŸç†ï¼Œå¹¶æŽ¢è®¨äº†è¯¥é¡¹æŠ€æœ¯çš„å‘展趋势。
本文引用地å€: http://
一ã€ç”µå控制转å‘系统的å‘展概况
自1953年通用汽车公å¸åœ¨å‡¯è¿ªæ‹‰å…‹å’Œåˆ«å…‹è½¿è½¦ä¸Šé¦–次批é‡ä½¿ç”¨æ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统以æ¥ï¼Œæ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统给汽车的å‘展带æ¥äº†å·¨å¤§çš„å˜åŒ–,使驾驶员的转å‘æ“纵力大大é™ä½Žï¼Œè½¬å‘çš„çµæ•æ€§å¾—到了æ高。éšç€ç”Ÿäº§æŠ€æœ¯çš„å‘展,动力转å‘系统在体积ã€ä»·æ ¼å’Œæ‰€æ¶ˆè€—的功率ç‰æ–¹é¢éƒ½å–得了惊人的进æ¥ã€‚在20世纪80年代åŽæœŸï¼Œåˆå¼€å‘了å˜å‡é€Ÿæ¯”ã€ç”µæŽ§æ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统。但是动力转å‘系统的技术é©æ–°éƒ½æ˜¯åŸºäºŽæ¶²åŽ‹åŠ¨åŠ›è½¬å‘ç³»ç»Ÿçš„ï¼Œæ— æ³•æ¶ˆé™¤HPS系统在布置ã€å®‰è£…ã€å¯†å°æ€§ã€æ“纵çµæ•åº¦ã€èƒ½é‡æ¶ˆè€—ã€ç£¨æŸä¸Žå™ªå£°ç‰æ–¹é¢çš„缺陷。直到1988年日本铃木公å¸é¦–次开å‘出一ç§å…¨æ–°çš„电å控制å¼ç”µåŠ¨åŠ©åŠ›è½¬å‘系统,æ‰çœŸæ£æ‘†è„±äº†æ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统的æŸç¼š[1]。
æ¤åŽï¼Œç”µåŠ¨åŠ©åŠ›è½¬å‘技术得到迅速å‘展,其应用范围已ç»ä»Žå¾®åž‹è½¿è½¦å‘大型轿车和客车方å‘å‘展。日本的大å‘汽车公å¸ã€ä¸‰è±æ±½è½¦å…¬å¸ã€æœ¬ç”°æ±½è½¦å…¬å¸ï¼Œç¾Žå›½çš„Delphiå…¬å¸ï¼Œè‹±å›½çš„Lueaså…¬å¸ï¼Œå¾·å›½çš„ZFå…¬å¸ï¼Œéƒ½ç ”制出了å„自的EPS。如大å‘汽车公å¸åœ¨å…¶Mira车上装备了EPS,三è±æ±½è½¦å…¬å¸åœ¨å…¶Minica车上装备了EPS,本田汽车公å¸åœ¨Accord车上装备了EPS。Delphiå…¬å¸å·²ç»ä¸ºå¤§ä¼—çš„Poloã€è²äºšç‰¹Puntoå¼€å‘出EPS[2]。本田还在其AcuraNXS赛车上装备了EPS[3]。
EPS的助力形å¼ä¹Ÿä»Žä½Žé€ŸèŒƒå›´åŠ©åŠ›åž‹å‘全速范围助力型å‘展,并且其控制形å¼ä¸ŽåŠŸèƒ½ä¹Ÿè¿›ä¸€æ¥åŠ 强。日本早期开å‘çš„EPS仅仅在低速和åœè½¦æ—¶æ供助力,高速时EPSå°†åœæ¢å·¥ä½œã€‚新一代的EPS则ä¸ä»…在低速和åœè½¦æ—¶æ供助力,而且还能在高速时æ高汽车的æ“纵稳定性。如日本铃木公å¸è£…备在WagonR+车上的EPS是一个负载-è·¯é¢-车速感应型助力转å‘系统[4]。由Delphiå…¬å¸ä¸ºFunte车开å‘çš„EPS为全范围助力型,并且设置了两个开关,其ä¸ä¸€ä¸ªç”¨äºŽéƒŠåŒºï¼Œå¦ä¸€ä¸ªç”¨äºŽå¸‚区和åœè½¦ã€‚当车速大于70km/håŽï¼Œè¿™ä¸¤ç§å¼€å…³è®¾ç½®çš„程åºåˆ™æ˜¯ä¸€æ ·çš„,以ä¿è¯æ±½è½¦åœ¨é«˜é€Ÿæ—¶æœ‰åˆé€‚çš„è·¯æ„Ÿï¼Œè¿™æ ·å³ä½¿æ±½è½¦è¡Œé©¶åˆ°é«˜é€Ÿå…¬è·¯æ—¶é©¾é©¶å‘˜å¿˜è®°åˆ‡æ¢å¼€å…³ä¹Ÿä¸ä¼šå‘生å±é™©ã€‚å¸‚åŒºåž‹å¼€å…³è¿˜ä¸Žæ²¹é—¨æœ‰å…³ï¼Œä½¿å¾—åœ¨è¸©æ²¹é—¨åŠ é€Ÿå’Œæ¾æ²¹é—¨å‡é€Ÿæ—¶ï¼Œè½¬å‘更平滑。
éšç€ç”µå技术的å‘展,EPS技术日趋完善,并且其æˆæœ¬å¤§å¹…度é™ä½Žï¼Œä¸ºæ¤å…¶åº”用范围将越æ¥è¶Šå¤§ã€‚
早在20世纪60年代末,德国Kasselmannç‰è¯•å›¾å°†è½¬å‘盘与转å‘车轮之间通过导线连接(å³ç”µå转å‘系统),但由于当时电å和控制技术的制约,电å转å‘ç³»ç»Ÿä¸€ç›´æ— æ³•åœ¨å®žè½¦ä¸Šå®žçŽ°ã€‚å¥”é©°å…¬å¸äºŽ1990年开始了å‰è½®ç”µå转å‘ç³»ç»Ÿçš„æ·±å…¥ç ”å‘,并将其开å‘的电å转å‘系统应用于概念车F400Carving上。世界其他å„大汽车厂家ã€ç ”å‘机构(包括Daimler-Chryslerã€å®é©¬ã€ZFã€DELPHIã€TRWç‰ï¼‰ä»¥åŠæ—¥æœ¬çš„光洋(Koyoï¼‰ç²¾å·¥æŠ€æœ¯ç ”ç©¶æ‰€ã€æ—¥æœ¬å›½ç«‹å¤§å¦ã€æœ¬ç”°æ±½è½¦å…¬å¸ç‰ä¹Ÿå…ˆåŽå¯¹æ±½è½¦ç”µå转å‘系统åšäº†æ·±å…¥ç ”究。目å‰è®¸å¤šæ±½è½¦å…¬å¸å¼€å‘了自己的电å转å‘系统,一些国际著å汽车生产商已在其概念车上安装了该系统。
日本KoyoæŠ€æœ¯ç ”ç©¶æ‰€æ ¹æ®ä»–ä»¬è‡ªå·±çš„ç ”ç©¶è¯•éªŒç»“æžœï¼Œåˆ©ç”¨ç”µå转å‘系统进行主动控制的汽车,在摩擦系数很å°çš„åšå®žé›ªåœ°ä¸Šè¿›è¡Œè›‡è¡Œã€ç§»çº¿ã€ä¾§å‘风试验ä¸åŸºæœ¬æŒ‰ç…§é¢„å®šçš„è½¨è¿¹è¡Œé©¶ï¼Œæ¯”ä¼ ç»Ÿè½¬å‘系统在路线跟踪性能上有较大的æ高。在对开路é¢ä¸Šè¿›è¡Œåˆ¶åŠ¨è¯•éªŒä¹Ÿèƒ½åŸºæœ¬ä¿è¯æ±½è½¦çš„直线行驶,制动è·ç¦»ä¹Ÿå¤§å¤§ç¼©çŸã€‚
日本大å¦å’Œæœ¬ç”°æ±½è½¦å…¬å¸åœ¨æ±½è½¦ç”µå转å‘系统方é¢ä¹Ÿåšäº†ä¸€äº›ç†è®ºå·¥ä½œå’Œæ¨¡æ‹Ÿå™¨è¯•éªŒç ”究。他们从人—车é—环系统特性出å‘,设计了ç†æƒ³çš„转å‘ç³»ç»Ÿä¼ åŠ¨æ¯”ï¼Œä½¿æ±½è½¦çš„ç¨³æ€å¢žç›Šä¸éšè½¦é€Ÿå˜åŒ–,并é‡ç‚¹ç ”究了驾驶员角控制特性和力控制特性对汽车主动安全性的影å“。
å®é©¬æ±½è½¦å…¬å¸çš„概念车BMWZ22,应用了SBWSå’ŒBBW(Brake-By-Wire)技术,转å‘盘的转动范围å‡å°‘到了160°,使紧急转å‘时驾驶员的忙碌程度得到了很大程度的é™ä½Žã€‚
ç›®å‰ç”±äºŽæ±½è½¦ä¾›ç”µç³»ç»Ÿçš„å› ç´ ï¼Œè½¬å‘电动机难以æ供较大功率,现阶段电å转å‘ç³»ç»Ÿçš„ç ”ç©¶ä»¥åŠè¿‘期的应用对象主è¦é’ˆå¯¹è½¿è½¦ã€‚è¦åœ¨é‡åž‹è½½è´§æ±½è½¦ä¸Šåº”用,还必须采用液压执行机构。éšç€è“„ç”µæ± æŠ€æœ¯çš„å‘展和42V电å设备在汽车上的应用,全电å转å‘系统将应用到ä¸åž‹å’Œé‡åž‹è½¦ä¸Šã€‚ç›®å‰ï¼Œ42V电æºå·²ç»åœ¨ä¸€äº›æ¦‚念车上得到应用,通用的“自主é”力â€å’ŒBertone的“FILOâ€éƒ½é‡‡ç”¨äº†42V电æºã€‚
国内动力转å‘器目å‰è¿˜å¤„于机械—液压动力转å‘阶段,对于电动助力转å‘系统,清åŽå¤§å¦ã€åŒ—京ç†å·¥å¤§å¦ã€åŽå—ç†å·¥å¤§å¦ç‰é«˜æ ¡å¼€å±•äº†ç³»ç»Ÿç»“构方案设计和系统建模åŠåŠ¨åŠ›åˆ†æžç‰ç ”究,但目å‰è¿˜æ²¡æœ‰å®žç”¨çš„电动助力转å‘系统和电å转å‘系统。
二ã€EPS的组æˆåŽŸç†å’Œåˆ†ç±»
(一)EPS的组æˆ
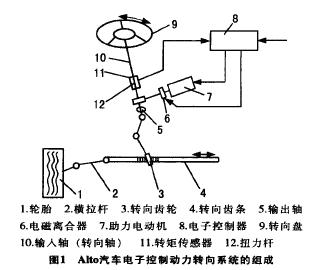
电动助力转å‘ç³»ç»Ÿæ˜¯åœ¨ä¼ ç»Ÿæœºæ¢°è½¬å‘机构的基础上å‘展起æ¥çš„ã€‚ç³»ç»Ÿé€šå¸¸ç”±è½¬çŸ©ä¼ æ„Ÿå™¨ã€è½¦é€Ÿä¼ 感器ã€ç”µå控制器ã€ç”µåŠ¨æœºã€ç”µç£ç¦»åˆå™¨å’Œå‡é€Ÿæœºæž„ç‰ç»„æˆ[5]。Alto汽车电å控制动力转å‘系统的组æˆå¦‚图1所示。
(二)EPS的原ç†
电å控制动力转å‘系统是利用电动机作为助力æºï¼Œæ ¹æ®è½¬å‘å‚数和车速ç‰ï¼Œç”±å¾®æœºå®ŒæˆåŠ©åŠ›å·¥ä½œçš„,其原ç†å¯æ¦‚述如下。
ä¸è½¬å‘时,电动机ä¸å·¥ä½œï¼›å½“æ“纵转å‘盘时,装在转å‘ç›˜è½´ä¸Šçš„è½¬çŸ©ä¼ æ„Ÿå™¨ä¸æ–检测转å‘轴上的转矩,并由æ¤äº§ç”Ÿä¸€ä¸ªç”µåŽ‹ä¿¡å·ï¼Œè¯¥ä¿¡å·ä¸Žè½¦é€Ÿä¿¡å·åŒæ—¶è¾“入电å控制器,由控制器ä¸çš„å¾®æœºæ ¹æ®è¿™äº›è¾“入信å·è¿›è¡Œè¿ç®—处ç†ï¼Œç¡®å®šåŠ©åŠ›è½¬çŸ©çš„大å°å’Œæ–¹å‘,å³é€‰å®šç”µåŠ¨æœºçš„电æµå’Œè½¬å‘,调整转å‘的辅助动力。电动机的转矩由电ç£ç¦»åˆå™¨é€šè¿‡å‡é€Ÿæœºæž„å‡é€Ÿå¢žçŸ©åŽï¼ŒåŠ 在汽车的转å‘机构上,使之得到一个与工况相适应的转å‘作用力。
电å控制电动助力转å‘æŽ§åˆ¶ç³»ç»Ÿçš„æ ¸å¿ƒæ˜¯ä¸€ä¸ª4kBROMå’Œ256kBRAMçš„8ä½å¾®æœºã€‚
转å‘盘转矩信å·å’Œè½¦é€Ÿä¿¡å·ç»è¿‡è¾“入接å£é€å…¥å¾®æœºï¼Œéšç€è½¦é€Ÿçš„æ高,通过微机控制相应地é™ä½ŽåŠ©åŠ›ç”µåŠ¨æœºç”µæµï¼Œä»¥å‡å°‘助力转矩。å‘动机转速信å·ä¹Ÿè¢«é€å…¥å¾®æœºï¼Œå½“å‘åŠ¨æœºå¤„äºŽæ€ é€Ÿæ—¶ï¼Œç”±äºŽä¾›ç”µä¸è¶³ï¼ŒåŠ©åŠ›ç”µåŠ¨æœºå’Œç¦»åˆå™¨ä¸å·¥ä½œã€‚点ç«å¼€å…³çš„通æ–(on/off)信å·ç»A/D转æ¢æŽ¥å£é€å…¥å¾®æœºï¼Œå½“点ç«å¼€å…³æ–开时,电动机和离åˆå™¨ä¸èƒ½å·¥ä½œã€‚微机控制指令ç»D/A转æ¢åŽé€å…¥ç”µåŠ¨æœºå’Œç¦»åˆå™¨çš„驱动放大电路ä¸ï¼ŒæŽ§åˆ¶ç”µåŠ¨æœºçš„旋转方å‘和离åˆå™¨çš„结åˆã€‚电动机的电æµç»é©±åŠ¨æ”¾å¤§å›žè·¯ã€ç”µæµè¡¨Aã€A/D转æ¢æŽ¥å£å馈给微机,将电动机的实际电æµä¸ŽæŒ‰å¾®æœºæŒ‡ä»¤åº”给的电æµç›¸æ¯”较,调节电动机的实际电æµï¼Œä½¿ä¸¤è€…接近一致。
(三)EPS分类
æ ¹æ®ç”µåŠ¨æœºé©±åŠ¨éƒ¨ä½çš„ä¸åŒï¼Œå°†ç”µåŠ¨åŠ©åŠ›è½¬å‘系统分为3类:转å‘轴助力å¼ã€è½¬å‘器å°é½¿è½®åŠ©åŠ›å¼å’Œé½¿æ¡åŠ©åŠ›å¼[6-10]。
图1为转å‘轴助力å¼è½¬å‘ç³»ç»Ÿã€‚å…¶è½¬çŸ©ä¼ æ„Ÿå™¨ã€ç”µåŠ¨æœºã€ç¦»åˆå™¨å’Œè½¬å‘助力机构组æˆä¸€ä½“,安装在转å‘柱上。其特点是结构紧凑,所测å–的转矩信å·ä¸ŽæŽ§åˆ¶ç›´æµç”µåŠ¨æœºåŠ©åŠ›çš„å“应性较好。这ç§ç±»åž‹ä¸€èˆ¬åœ¨è½¿è½¦ä¸Šä½¿ç”¨ã€‚
å°é½¿è½®åŠ©åŠ›å¼è½¬å‘ç³»ç»Ÿçš„è½¬çŸ©ä¼ æ„Ÿå™¨ã€ç”µåŠ¨æœºã€ç¦»åˆå™¨å’Œè½¬å‘助力机构ä»ä¸ºä¸€ä½“,åªæ˜¯æ•´ä½“安装在转å‘å°é½¿è½®å¤„,直接给å°é½¿è½®åŠ©åŠ›ï¼Œå¯èŽ·å¾—较大的转å‘力。该形å¼å¯ä½¿å„部件布置更方便,但当转å‘盘与转å‘器之间装有万å‘ä¼ åŠ¨è£…ç½®æ—¶ï¼Œè½¬çŸ©ä¿¡å·çš„å–得与助力车轮部分ä¸åœ¨åŒä¸€ç›´çº¿ä¸Šï¼Œå…¶åŠ©åŠ›æŽ§åˆ¶ç‰¹æ€§éš¾ä»¥ä¿è¯å‡†ç¡®ã€‚
齿æ¡åŠ©åŠ›å¼è½¬å‘ç³»ç»Ÿçš„è½¬çŸ©ä¼ æ„Ÿå™¨å•ç‹¬åœ°å®‰è£…在å°é½¿è½®å¤„,电动机与转å‘助力机构一起安装在å°é½¿è½®å¦ä¸€ç«¯çš„齿æ¡å¤„,用以给齿æ¡åŠ©åŠ›ã€‚该类型åˆæ ¹æ®å‡é€Ÿä¼ 动机构的ä¸åŒå¯åˆ†ä¸ºä¸¤ç§:一ç§æ˜¯ç”µåŠ¨æœºåšæˆä¸ç©ºçš„。齿æ¡ä»Žä¸ç©¿è¿‡ï¼Œç”µåŠ¨æœºçš„动力ç»ä¸€å¯¹æ–œé½¿è½®å’Œèžºæ†èžºæ¯ä¼ 动副以åŠä¸Žèžºæ¯åˆ¶æˆä¸€ä½“的铰接å—ä¼ ç»™é½¿æ¡ã€‚è¿™ç§ç»“构是第一代电动助力转å‘系统,由于电动机ä½äºŽé½¿æ¡å£³ä½“内,结构å¤æ‚ï¼Œä»·æ ¼é«˜ï¼Œç»´ä¿®ä¹Ÿå›°éš¾ã€‚å¦ä¸€ç§æ˜¯ç”µåŠ¨æœºä¸Žé½¿æ¡çš„壳体相互独立。电动机动力ç»å¦ä¸€å°é½¿è½®ä¼ 给齿æ¡ï¼Œç”±äºŽæ˜“äºŽåˆ¶é€ å’Œç»´ä¿®ï¼Œæˆæœ¬ä½Žï¼Œå·²å–代了第一代产å“ã€‚å› ä¸ºé½¿æ¡ç”±ä¸€ä¸ªç‹¬ç«‹çš„齿轮驱动,å¯ç»™ç³»ç»Ÿè¾ƒå¤§çš„助力,主è¦ç”¨äºŽé‡åž‹æ±½è½¦ã€‚
三ã€ç”µå转å‘系统
电å转å‘系统(Steering-By-WireSystem,SBWS)由转å‘盘模å—ã€è½¬å‘执行模å—和主控制器(ECU)3个主è¦éƒ¨åˆ†ä»¥åŠè‡ªåŠ¨é˜²æ•…障系统ã€ç”µæºç‰è¾…助模å—组æˆï¼Œå¦‚图2所示。转å‘盘模å—包括转å‘盘ã€è½¬å‘ç›˜è½¬è§’ä¼ æ„Ÿå™¨ã€è½¬çŸ©ä¼ 感器和转å‘盘回æ£åŠ›çŸ©ç”µåŠ¨æœºã€‚其主è¦åŠŸèƒ½æ˜¯å°†é©¾é©¶å‘˜çš„转å‘æ„图(通过测é‡è½¬å‘盘转角)转æ¢æˆæ•°å—ä¿¡å·å¹¶ä¼ 递给主控制器;åŒæ—¶æŽ¥æ”¶ä¸»æŽ§åˆ¶å™¨é€æ¥çš„力矩信å·ï¼Œäº§ç”Ÿè½¬å‘盘回æ£åŠ›çŸ©ï¼Œä»¥æ供给驾驶员相应的路感信æ¯ã€‚
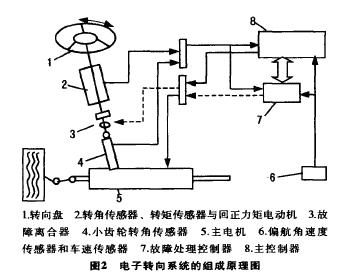
转å‘执行模å—ç”±å‰è½®è½¬è§’ä¼ æ„Ÿå™¨ã€è½¬å‘执行电动机ã€è½¬å‘电动机控制器和å‰è½®è½¬å‘组件ç‰ç»„æˆã€‚其主è¦åŠŸèƒ½æ˜¯æŽ¥æ”¶ä¸»æŽ§åˆ¶å™¨çš„命令,控制转å‘电动机实现è¦æ±‚çš„å‰è½®è½¬è§’,完æˆé©¾é©¶å‘˜çš„转å‘æ„图。
主控制器对采集的信å·è¿›è¡Œåˆ†æžå¤„ç†ï¼Œåˆ¤åˆ«æ±½è½¦çš„è¿åŠ¨çŠ¶æ€ï¼Œå‘转å‘盘回æ£åŠ›çŸ©ç”µåŠ¨æœºå’Œè½¬å‘电动机å‘é€å‘½ä»¤ï¼ŒæŽ§åˆ¶ä¸¤ä¸ªç”µåŠ¨æœºçš„工作,尽å¯èƒ½ä¿è¯åœ¨ä¸åŒè½¦é€Ÿä¸‹æ±½è½¦è½¬å‘å“应特性基本一致,å‡å°‘驾驶员对汽车转å‘特性éšè½¦é€Ÿå˜åŒ–而进行补å¿çš„任务,å‡è½»é©¾é©¶å‘˜è´Ÿæ‹…。åŒæ—¶æŽ§åˆ¶å™¨è¿˜å¯ä»¥å¯¹é©¾é©¶å‘˜çš„æ“作指令进行识别,判定在当å‰çŠ¶æ€ä¸‹é©¾é©¶å‘˜çš„转å‘æ“作是å¦åˆç†ï¼Œå½“汽车处于éžç¨³å®šçŠ¶æ€æˆ–驾驶员å‘出错误指令时,电å转å‘系统将自动进行稳定控制或将驾驶员错误的转å‘æ“作å±è”½ï¼Œè€Œä»¥åˆç†çš„æ–¹å¼è‡ªåŠ¨é©¾é©¶è½¦è¾†ï¼Œä½¿æ±½è½¦å°½å¿«åœ°æ¢å¤åˆ°ç¨³å®šçŠ¶æ€ã€‚
故障处ç†æŽ§åˆ¶å™¨æ˜¯ç”µå转å‘系统的é‡è¦æ¨¡å—,它包括一系列的监控和实施算法,针对ä¸åŒçš„故障形å¼å’Œæ•…éšœç‰çº§ä½œå‡ºç›¸åº”的处ç†ï¼Œä»¥æ±‚最大é™åº¦åœ°ä¿æŒæ±½è½¦çš„æ£å¸¸è¡Œé©¶ã€‚它采用å•ç‹¬çš„专用处ç†å™¨ï¼Œèƒ½æ›´å¥½åœ°æ高汽车安全性能。
电å转å‘系统目å‰å˜åœ¨ä¸¤ç§å½¢å¼:å‰è½®ç”µå转å‘系统和åŽè½®ç”µå转å‘系统。å‰è€…ï¼Œä¼ ç»Ÿçš„è½¬å‘元件被2个布置在汽车å‰ä¾§è§’è½çš„激励器所代替,这2个激励器从控制器获å–ä¿¡æ¯ï¼Œä»Žè€Œé©±åŠ¨å‰è½®ï¼ŒåŒæ—¶ï¼Œè¯¥ç³»ç»Ÿè¿˜åˆ©ç”¨ç”µåŠ¨æœºå‘驾驶员æ供路é¢ä¿¡æ¯ã€‚至于åŽè½®ç”µå转å‘ç³»ç»Ÿï¼Œåˆ™æ˜¯åˆ©ç”¨ä¼ æ„Ÿå™¨æ¥ç¡®å®šåŽè½®çš„å转,并以å‰è½®çš„å转角度和车速作为å‚考。
å››ã€ç”µå控制动力转å‘系统的特点
将电å控制动力转å‘系统åŒæ™®é€šæ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统的性能进行比较[8-12],其优越性主è¦è¡¨çŽ°åœ¨ä»¥ä¸‹å‡ 个方é¢ã€‚
1.在å„ç§è¡Œé©¶å·¥å†µä¸‹æ供最佳助力,å‡å°ç”±è·¯é¢ä¸å¹³æ‰€å¼•èµ·çš„对转å‘系统的扰动,改善汽车的转å‘特性,å‡è½»æ±½è½¦ä½Žé€Ÿè¡Œé©¶æ—¶çš„转å‘æ“纵力,æ高汽车高速行驶时的转å‘稳定性,进而æ高汽车的主动安全性。并且å¯é€šè¿‡è®¾ç½®ä¸åŒçš„转å‘助力特性æ¥æ»¡è¶³ä¸åŒä½¿ç”¨å¯¹è±¡çš„需è¦ã€‚
2.电å控制动力转å‘系统åªæœ‰åœ¨è½¬å‘时电动机æ‰æ供助力(而HPSå³ä½¿åœ¨ä¸è½¬å‘时,油泵也一直è¿è½¬ï¼‰ï¼Œå› 而能å‡å°‘燃料消耗。åŒæ—¶å–消了油泵ã€çš®å¸¦ã€çš®å¸¦è½®ã€æ¶²åŽ‹è½¯ç®¡ç‰ï¼Œå…¶é›¶ä»¶æ¯”HPS大大å‡å°‘ï¼Œå› è€Œå…¶è´¨é‡è½»ï¼Œç»“构紧凑,在安装ä½ç½®é€‰æ‹©æ–¹é¢ä¹Ÿæ›´å®¹æ˜“,并且能é™ä½Žå™ªå£°ã€èŠ‚çœèƒ½æºã€å‡å°‘废气排放。
3.由于直接由电动机æä¾›åŠ©åŠ›ï¼Œç”µåŠ¨æœºç”±è“„ç”µæ± ä¾›ç”µï¼Œå› æ¤EPS能å¦åŠ©åŠ›ä¸Žå‘动机是å¦èµ·åŠ¨æ— 关,å³ä½¿åœ¨å‘动机熄ç«æˆ–出现故障时也能æ供助力。
4.电å控制动力转å‘系统没有液压回路,比HPS更容易调整和检测,装é…自动化程度更高。并且å¯ä»¥é€šè¿‡è®¾ç½®ä¸åŒçš„程åºèƒ½å¿«é€Ÿåœ°ä¸Žä¸åŒè½¦åž‹ç›¸åŒ¹é…ï¼Œå› è€Œèƒ½ç¼©çŸå¼€å‘和生产周期。
5.液压动力转å‘系统在低温下起动å‘动机åŽï¼Œç”±äºŽä½Žæ¸©ä¸‹æ²¹çš„粘度较大,转å‘时作用力较高。电动助力转å‘系统在低温下ä¸ä¼šå¢žåŠ 转å‘作用力和å‘动机负è·ï¼Œå› 而其低温è¿è¡ŒçŠ¶å†µå¥½äºŽå‰è€…。
6.SBWS系统还能改善驾驶员的“路感â€ã€‚由于转å‘盘和转å‘è½®ä¹‹é—´æ— æœºæ¢°è¿žæŽ¥ï¼Œé©¾é©¶å‘˜â€œè·¯æ„Ÿâ€é€šè¿‡æ¨¡æ‹Ÿç”Ÿæˆã€‚在回æ£åŠ›çŸ©æŽ§åˆ¶æ–¹é¢å¯ä»¥ä»Žä¿¡å·ä¸æ出最能够åæ˜ æ±½è½¦å®žé™…è¡Œé©¶çŠ¶æ€å’Œè·¯é¢çŠ¶å†µçš„ä¿¡æ¯ï¼Œä½œä¸ºè½¬å‘盘回æ£åŠ›çŸ©çš„控制å˜é‡ï¼Œä½¿è½¬å‘盘仅仅å‘驾驶员æ供有用信æ¯ï¼Œä»Žè€Œä¸ºé©¾é©¶å‘˜æ供更为真实的“路感â€ã€‚
7.SBWS能消除转å‘干涉问题,为实现多功能全方ä½çš„自动控制以åŠæ±½è½¦åŠ¨æ€æŽ§åˆ¶ç³»ç»Ÿå’Œæ±½è½¦å¹³é¡ºæ€§æŽ§åˆ¶ç³»ç»Ÿçš„集æˆæ供了显著的先决æ¡ä»¶ã€‚
8.对å‰è½®é©±åŠ¨æ±½è½¦ï¼Œåœ¨å®‰è£…å‘动机时需è¦è€ƒè™‘刚性转å‘è½´å 用空间,转å‘è½´å¿…é¡»ä¾æ®æ±½è½¦æ˜¯å·¦ä¾§è¿˜æ˜¯å³ä¾§é©¾é©¶ï¼Œå®‰è£…在å‘动机附近,设计人员必须å调处ç†å„ç§éœ€è¦å®‰æŽ’部件。而SBWS去掉了原æ¥è½¬å‘系统å„个模å—之间的刚性机械连接,大大方便了系统的总布置。
五ã€ç”µå控制动力转å‘系统的å‘展趋势
电动助力转å‘系统ç»è¿‡åå‡ å¹´çš„å‘展,在é™ä½Žè‡ªé‡ã€å‡å°‘生产æˆæœ¬ï¼ŒæŽ§åˆ¶ç³»ç»Ÿå‘çƒã€ç”µæµæ¶ˆè€—ã€å†…部摩擦,整车进行匹é…获得åˆç†çš„助力特性以åŠä¿è¯è‰¯å¥½çš„路感方é¢å–得了é‡å¤§è¿›æ¥ã€‚电动助力转å‘系统在æ“纵舒适性和安全性ã€èŠ‚能ç‰æ–¹é¢å……分显示了其优越性,如今已在轻型车和轿车上得到应用并具有良好的工作性能。éšç€ç›´æµç”µæœºæ€§èƒ½çš„改进,其应用范围将越æ¥è¶Šå¹¿ã€‚æ®TRWå…¬å¸é¢„测,到2010年,全世界生产的æ¯3辆轿车ä¸å°±æœ‰1辆装备EPS,特别是低排放汽车ã€æ··åˆåŠ¨åŠ›æ±½è½¦ã€ç‡ƒæ–™ç”µæ± 汽车ã€ç”µåŠ¨æ±½è½¦å°†æž„æˆæœªæ¥æ±½è½¦å‘展的主体,这给电å控制转å‘系统带æ¥äº†æ›´åŠ 广阔的应用å‰æ™¯ã€‚
尽管目å‰åœ¨æ¬§æ´²æ±½è½¦æ³•è§„ä¸è¦æ±‚驾驶员与转å‘车轮之间必须有机械连接,电å转å‘系统还ä¸å…许在欧洲上市。但åªè¦ç”Ÿäº§å•†èƒ½å¤Ÿæœ‰è¶³å¤Ÿçš„è¯æ®è¡¨æ˜Žç”µå转å‘系统的安全å¯é 性,它得到上市许å¯è¿˜æ˜¯å®Œå…¨å¯èƒ½çš„。电å控制转å‘系统的最终å‘å±•è¶‹åŠ¿åœ¨ä»¥ä¸‹å‡ ä¸ªæ–¹é¢ã€‚
1.改善控制系统性能ã€å‡å°æŽ§åˆ¶å•å…ƒå’Œé©±åŠ¨å•å…ƒçš„体积åŠé™ä½ŽæŽ§åˆ¶ç³»ç»Ÿçš„åˆ¶é€ æˆæœ¬ï¼Œä½¿ä¹‹æ›´å¥½åœ°ä¸Žä¸åŒæ¡£æ¬¡æ±½è½¦ç›¸é€‚应。如改进电动机控制技术,消除由于电动机惯性大ã€æ‘©æ“¦åŠ›æ‰€å¸¦æ¥çš„转å‘路感ä¸è¶³ç‰ç¼ºç‚¹ï¼Œä½¿ç”µåŠ¨åŠ©åŠ›è½¬å‘系统也能应用于é‡åž‹è½½è´§æ±½è½¦ä¸Šã€‚
2.实现电动助力转å‘系统控制å•å…ƒä¸Žæ±½è½¦ä¸Šå…¶ä»–控制å•å…ƒçš„通讯è”系,以实现整车电å控制系统一体化。
3ï¼Žå°†æ ¹æ®è½¦é€Ÿã€è½¬çŸ©ã€è½¬å‘角ã€è½¬å‘速度ã€æ¨ªå‘åŠ é€Ÿåº¦ã€å‰è½´é‡åŠ›ç‰å¤šç§ä¿¡å·è¿›è¡Œä¸Žæ±½è½¦ç‰¹æ€§ç›¸å»åˆçš„综åˆæŽ§åˆ¶ï¼Œä»¥èŽ·å¾—更好的转å‘路感。
4.æ高系统的å¯é 性。这应从æ高系统å„部件的å¯é 性入手,如采用éžæŽ¥è§¦å¼è½¬çŸ©ä¼ 感器。
5.æ高系统的安全性。采用å–消转å‘盘的SBWS系统åŽï¼Œé©¾é©¶å®¤æœ‰æ›´å¤§çš„空间用于布置被动安全部件,å‡å°‘了å±é™©å‘生时对乘员的伤害。
电动转å‘技术由于其技术先进,性能优越,未æ¥å¿…å°†å–代其他动力转å‘技术,æˆä¸ºåŠ¨åŠ›è½¬å‘技术的主æµã€‚线控动力转å‘系统将是动力转å‘系统的å‘展方å‘,是未æ¥æ±½è½¦å¯¹å®‰å…¨æ€§ã€æ“纵稳定性和舒适性的更高è¦æ±‚,有ç€å¾ˆå¥½çš„å‘展å‰æ™¯ã€‚
当然,在汽车迈å‘å…¨é¢çº¿æŽ§è½¬å‘之å‰ï¼Œç”µåŠ¨è½¬å‘系统是“ä¸ç«™â€ï¼Œæ˜¯ç¬¬ä¸€æ¥ï¼Œå½“汽车装有电动转å‘系统时,其ä¸çš„转å‘电动机将接å—ä¸€ç³»åˆ—ä¼ æ„Ÿå™¨ä¿¡å·ï¼Œä¾‹å¦‚转å‘控制ã€åŠ¨æ€ç¨³å®šæŽ§åˆ¶ç‰ï¼Œæœ€åŽæœºæ¢°çš„部分一个一个消失,é€æ¸å˜æˆäº†å…¨é¢çº¿æŽ§è½¬å‘。
Â
China Area Array Sensor
Area Array Sensor,Passive Infrared Detector,Infrared Heat Detector,Infrared Area Sensor
Ningbo NaXin Perception Intelligent Technology CO., Ltd. , https://www.nicswir.com